

摘要:本文介绍了机器人的驱动装置及其核心组件。驱动装置是机器人的动力来源,负责将能量转化为机械运动,使机器人实现各种动作。核心组件包括电机、减速器、控制器等,它们共同协作,精确控制机器人的运动。这些部件的性能和质量直接影响机器人的运动精度、稳定性和使用寿命。了解这些核心组件的特点和功能对于机器人研发和应用至关重要。
本文目录导读:
随着科技的飞速发展,机器人技术已成为当今世界的热门话题,驱动装置作为机器人的重要组成部分,负责为机器人提供动力和运动控制,其性能直接影响到机器人的工作效率和性能,本文将详细介绍机器人的驱动装置及其核心组件,帮助读者更好地了解这一领域。
机器人的驱动装置概述
机器人的驱动装置是机器人运动控制的核心部分,主要包括动力源和传动机构,动力源为机器人提供动力,而传动机构则将动力源产生的力量传递给机器人的各个关节,从而实现机器人的运动。
核心驱动装置及组件
1、电机
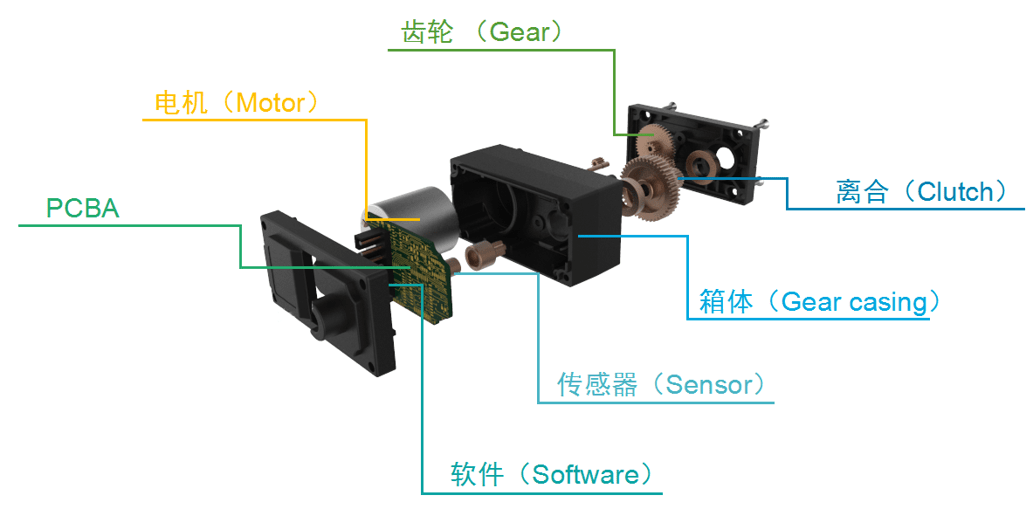
电机是机器人驱动装置的核心组件,负责将电能转换为机械能,为机器人提供动力,常见的电机类型包括直流电机、交流电机、步进电机和伺服电机等,直流电机和交流电机广泛应用于机器人的行走、旋转等动作,而步进电机和伺服电机则常用于需要精确控制位置和速度的应用场景。
2、减速器
减速器用于降低电机的转速,增加扭矩,使机器人能够更加平稳、精确地运动,常见的减速器类型包括齿轮减速器、谐波减速器等,谐波减速器具有体积小、重量轻、传动效率高等优点,广泛应用于高精度机器人。
3、传感器
传感器在机器人驱动装置中起着关键作用,主要用于检测机器人的运动状态、位置和速度等参数,常见的传感器类型包括位置传感器、速度传感器和加速度传感器等,这些传感器能够将机器人的运动状态转换为电信号,从而实现对机器人运动的精确控制。
4、控制器
控制器是机器人驱动装置的大脑,负责接收传感器的信号,并根据这些信号控制电机的运动,控制器通过发送电信号给电机,调整电机的转速和扭矩,从而实现机器人的精确运动,现代控制器多采用数字化技术,具有高性能、高可靠性、易于编程等优点。
不同类型机器人的驱动装置特点
1、工业机器人
工业机器人通常需要在高负载、高速度和高精度的情况下工作,因此其驱动装置需要具备较高的功率密度、动态响应速度和定位精度,常见的工业机器人驱动装置采用交流伺服电机和减速器组合,配合高精度传感器和控制器,实现机器人的精确运动。
2、移动机器人
移动机器人需要在复杂的环境中自主导航和移动,因此其驱动装置需要具备较高的灵活性和适应性,常见的移动机器人驱动装置采用直流电机或轮毂电机,配合导航传感器和控制器,实现机器人的自主移动和避障。
3、服务机器人

服务机器人通常需要与人类进行交互,完成各种任务,因此其驱动装置需要具备良好的人机交互性能,常见的服务机器人驱动装置采用轻量型的电机和减速器,配合多种传感器和智能控制器,实现机器人的智能控制和人机交互。
机器人的驱动装置是机器人技术的重要组成部分,其性能直接影响到机器人的工作效率和性能,本文介绍了机器人的驱动装置及其核心组件,包括电机、减速器、传感器和控制器等,不同类型的机器人需要不同类型的驱动装置,以满足其特定的应用场景需求,随着科技的不断发展,机器人的驱动装置将会更加智能化、高效化和人性化,为机器人技术的应用和发展提供更好的支持。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...